在生產過程測量裝置的高級化、高速化、復雜化、靈活性、集中化的過程中,作為最基本的控制算法,由以前采用PID控制到應用微處理器的數字調節器的出現,各種PID算法層出不窮,2自由度PID控制也是這些控制算法中的一種。
經典PID控制在實際應用中還是存在缺點的:在實際的PID控制系統中雖然存在(抑制外部擾動最佳控制常數)和(跟蹤給定值最佳控制常數)2種類型的最佳控制常數, 但經典PID控制是只能設定1種類型控制常數的1自由度PID度控制方式。因此,如果設定控制常數使跟蹤給定值特性為最佳,則抑制外部擾動特性就變差(不好),若設定控制常數使抑制外部擾動錢性成為最佳, 則跟蹤給定值特性就成為振蕩的。因此,只好在運行中途進行設定,任其控制性能不佳。
昌暉儀表為了消除經典PID控制所具有的這些本質缺點,把(抑制外部擾動最佳控制常數)和(跟蹤給定值最佳控制常數)的2種類型的控制常數獨立進行設定,而且必需調節的參數是同一個數,從而研制了與以前的PID控制相比調節方法簡單、控制性能有極大提高的2自由度PID控制方式,并在YR-RJD系列通用溫控器中實用,在溫度、流量、壓力等過程控制中取得好的控制效果。

2自由度PID控制的功能必須具備在前面論述的自動調節、自適應控制和各種超前(前饋)控制 等一切控制系統的基本功能。如果過程控制使用2自由度PID控制調節方式,對于被控對象的各種變化,由于控制回路所具有的衰減特性而使變化被消除,所以可使裝置的運行特性發生改變。
昌暉儀表在介紹2自由度PID控制方式的前先說說導前微分控制方式。在數字控制中廣泛應用的測量值微分超前型導前微分PID控制,這種算法與一般控制偏差的PID控制相比,為了防止給定值設定變化時微分突變,對控制偏差進行PI運算,微分僅對PV(過程變量)產生動作。這種導前微分PID控制系統的基本功能有:
①對于外部擾 動變化的抑制性。
②對于給定值變化的跟蹤性。
但對于這兩個功能,控制常數(PID參數)的最佳值不是一種,而是存在兩種,即有抑制外部擾動最佳控制常數,也有跟蹤給定值最佳控制常數
控制常數和控制響應的關系
如前所述,雖然在PID控制系統中存在2種類型的最佳控制常數,但以前的1自由度PID控制方式只能設定1種類型的最佳控制常數。圖1反映當設定抑制外部擾動最佳控制常數時,跟蹤給定值特性的變化情況;圖2反映當設定跟蹤給定值最佳控制常數
時,抑制外部擾動特性的變化情況。
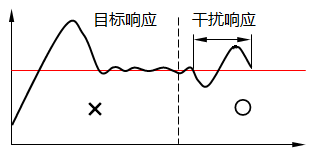
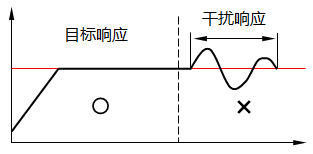
圖1 以前的PID控制重視干擾響應則目標值響應就變差 圖2 重視目標值響則應干擾響應就變差
由圖1和圖2可明顯地看出, 若設定控制常數使抑制外部擾動特性為最佳, 則跟蹤給定值特性就變成振蕩的,反之,若設定控制常數使跟蹤給定值特性為最佳,則抑制外部擾動特性變得平緩。
在以前的PID控制中,因為不能設定控制常數使跟蹤給定值和抑制外部擾動這兩個方面都成為最佳,所以,必須把控制常數設定在兩種特定的妥協點上,讓它具有適當的控制特性,這一點有待于改善。
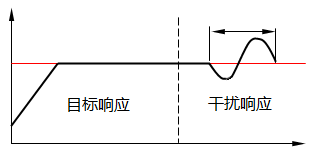
圖3 2自由度PID控制可同時滿足目標值響應和干擾響應的控制性能的動作
圖3反映的是2自由度PID控制兼顧目標值響應和干擾響應的示意圖。
實現2自由度PID控制的方法
實現2自由度PID控制方法很多,昌暉儀表介紹一種以給定值濾波器實現2自由度PID控制的方法。選用給定值濾波器實現2自由度PID控制有以下原因:
①它與數字控制系統中被廣泛應用的測量值微分超前形PID控制算法很相似,表達式的展開很簡明。
②因為它僅附加上給定值濾波器,所以容易適用于已經設定的溫控器。
③向偏差平方形PID控制、附加間隙的PID控制等控制算法的相應轉換容易。
總之,給定值濾波器2自由度PID控制方式是通用的,它有很好的發展性。
2自由度控制的特征和應用的優點
昌暉儀表把2自由度PID控制的特征歸納如下:
①可同時實現PID控制的調節方法的簡單化和控制性能的提高。
②串級控制的段數(n) 越大,效果越好(nn倍)。
③構造簡單,容易理解,容易適用于已經設立的系統。
④通過參數α、β和γ的設定,可任意的實現多種構造的PID控制。
給定濾波器H(S)在實現2自由度PID控制時的α、β、γ推薦值

⑤通過全面的應用,可實現裝置設備運行特性的革新。
⑥可通過以前的PID控制方式來替換它。